VOL.33
2026.07

고장 재현과 통합 안전 검증으로 레벨4 자율주행 상용화 앞당긴다
㈜에스더블유엠
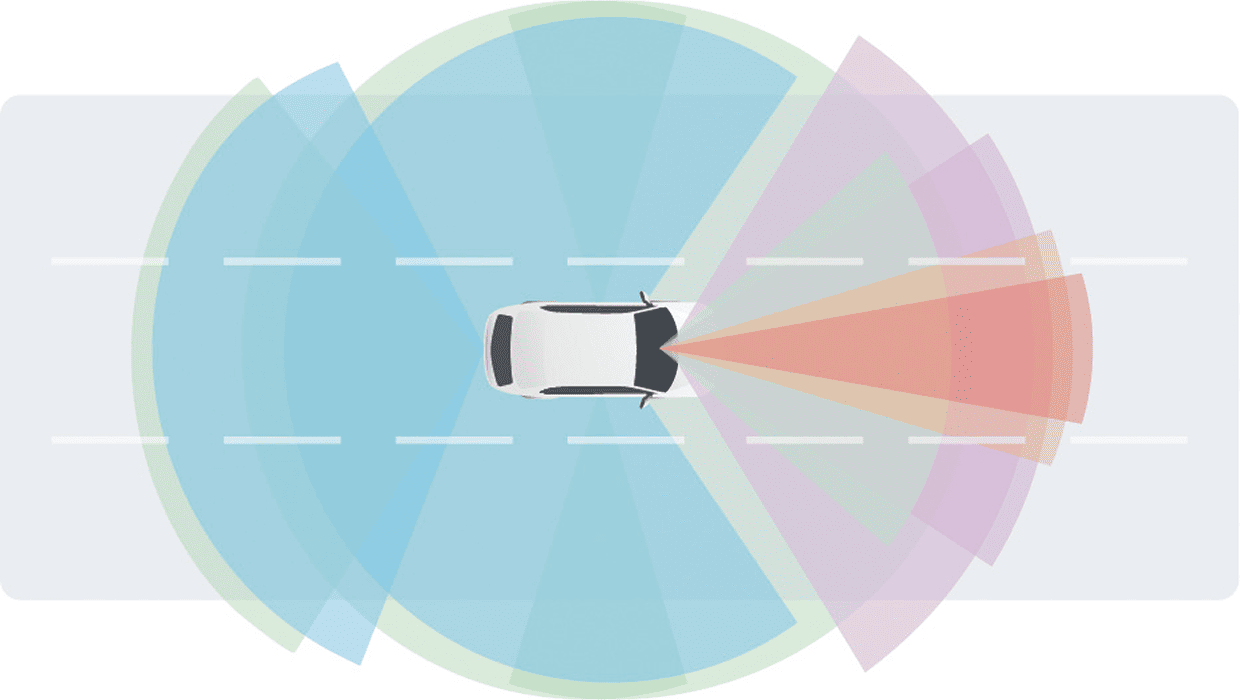
자율주행 기술이 빠르게 발전하고 있지만 상용화의 관건은 차량이 스스로 주행하는 능력만이 아니다.
예기치 못한 고장이 발생했을 때 얼마나 안전하게 대응할 수 있는지가 자율주행 시대의 핵심 과제로 떠오르고 있다.
에스더블유엠은 ‘Lv.4 자율주행 시스템 고장재현 및 통합 안전검증 기술개발’을 통해 자율주행차의 안전성을 검증하고 신뢰도를 높이는 기술 개발에 나서고 있다.
| 연구과제명 | Lv.4 자율주행 시스템 고장 재현 및 통합 안전 검증 기술 개발 |
| 제품명(적용 제품) | 자율주행 차량 |
| 개발기간(정부 과제 수행기간) | 2023년 4월 1일 ~ 2027년 12월 31일(예정) |
| 총 정부출연금 | 77억6000만 원 |
| 참여 연구진 | 주관 : ㈜에스더블유엠 유한민 상무 참여 : 씨엔비스㈜ 전민석 이사 ㈜모라이 전형석 이사 한국자동차연구원 정기윤 수석 한국전자통신연구원 김성훈 책임 케이지모빌리티㈜ 김진영 책임 |

 이번 호 PDF 다운로드
이번 호 PDF 다운로드 




