21세기, 점차 생활 속으로 다가오는 휴머노이드 로봇
아시모는 휴머노이드 로봇의 기술적 완성도를 한 단계 끌어올린 혁명적인 존재다. 자연스러운 보행과 더불어 뛰기, 계단 오르내리기 등 고도화된 동작을 안정적으로 수행했다. 경사로에서도
넘어지지 않고 자유롭게 움직일 수 있었다. 또한 공을 차거나, 쟁반을 나르거나, 악수하는 등 섬세한 동작이 가능했다. 아시모는 여러 전시회와 행사에서 대중에게 공개돼 휴머노이드
로봇의 가능성을 널리 알렸고, 일본의 기술력을 상징하는 아이콘이 되었다.
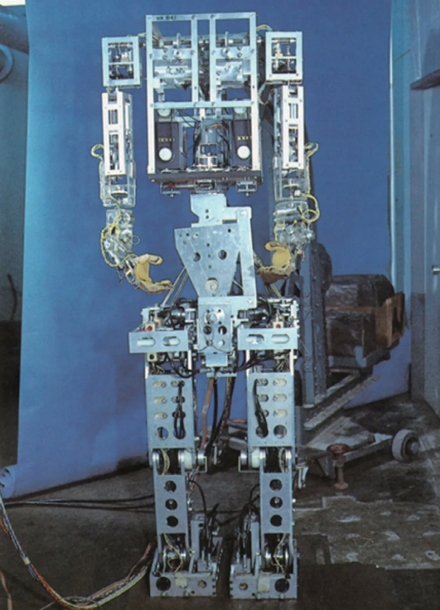
이에 자극받아 오준호 KAIST 교수팀도 2004년 휴머노이드 로봇 휴보Hubo를 개발했다. 휴보는 독자개발 기술로 아시모처럼 자연스러운 2족 보행이 가능하다. 특히 휴보는
2015년 미국 국방부 산하 국방고등연구계획국DARPA, Defense Advanced Research Projects Agency이 주최한 ‘DARPA 로보틱스 챌린지’에서
우승해 세계적으로 주목받았다. 이 대회는 2011년 후쿠시마 원전 사고에서 착안, 재난 상황에서 인간을 대신해 구조 임무를 수행하는 로봇의 성능을 겨루는 대회다. 휴보는 자동차
운전, 문 열고 들어가기, 밸브 잠그기, 사다리 오르기 등 8가지 미션을 모두 성공적으로 완수해 압도적인 점수 차이로 우승했다. 이는 재난 구조 로봇의 가능성을 보여주면서 로봇의
유용성에 대한 인식을 높인 사례였다.
이후 휴머노이드 로봇의 보행 기술은 날이 갈수록 발전했다. 공중제비까지 도는 보스턴다이내믹스의 아틀라스Atlas가 대표적인 사례다. 이러한 기술 발전에 힘입어 일론 머스크는
테슬라에서 개발한 옵티머스Optimus 로봇을 사상 최초의 보급형 휴머노이드 로봇으로 완성하겠다고 밝히기까지 했다. 수백만 대 규모의 대량생산과 합리적인 가격을 통해 자동차보다 더
큰 가치를 창출하는 로봇을 목표로 하고 있다.
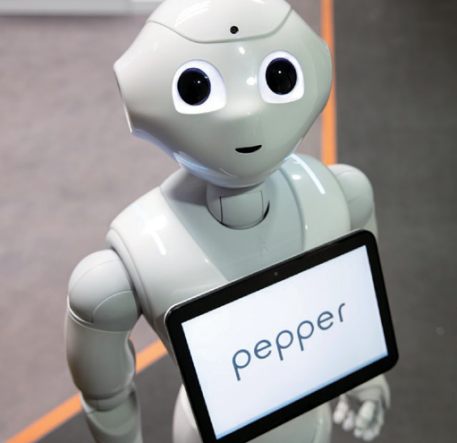
또한 로봇 기술은 인간에게 무형의 도움을 주는, 즉 감정 교류를 하는 방향으로도 발전하고 있다. 2014년 소프트뱅크가 선보인 로봇 페퍼Pepper가 좋은 사례다. 페퍼는 사람의
표정과 목소리 톤을 분석해 기분을 파악할 수 있다. 또한 로봇 자신의 감정적 반응을 표현할 수도 있다. 이런 기능을 통해 사용자가 슬퍼 보이면 위로의 말을 건네거나, 웃으면 함께
웃을 수 있다. 페퍼는 고객 응대, 정보 제공 및 안내 임무에 투입돼, 사람들과 직접 교류하며 서비스를 제공하는 로봇의 가능성을 보여주었다. 2016년 핸슨로보틱스가 선보인
소피아Sophia는 여기서 더 나아갔다. 인간과 덜 닮은 페퍼와는 달리 소피아는 인간과 매우 유사한 얼굴과 표정 기능을 갖고 있다. 2017년에는 사우디아라비아로부터 세계 최초로
로봇 시민권을 부여받아 큰 화제가 되기도 했다.
미래의 휴머노이드 로봇은 어느 방향으로 발전할 것인가? 우선 물리적 능력의 강화로 더욱 자연스러우면서도 강하고 정밀한 동작이 가능해질 것이다. 지능 역시 인공지능의 발전으로 자체
판단 및 학습 능력이 발달할 것이다. 이를 기반으로 휴머노이드 로봇은 상용화와 대중화를 거쳐 삶 곳곳에서 모습을 보일 것이다.










 이번 호 PDF 다운로드
이번 호 PDF 다운로드