인간처럼 움직이는 기술의 핵심, 모터와 감속기
휴머노이드 로봇의 몸체는 상체, 하체, 팔, 손가락, 발가락 등으로 구성됩니다. 이들 구성 요소는 인간의 신체 구조를 모방하여 설계합니다. 근육과 관절도 마찬가지입니다. 사람이
팔과 다리 등을 움직이려면 근육과 관절이 중요한데, 로봇에서는 관절 역할을 하는 구동장치 ‘액추에이터’의 성능이 곧 동작범위를 결정합니다.
액추에이터는 모터와 감속기로 구성됩니다. 사람마다 힘의 차이가 있듯, 로봇에서의 힘의 차이는 감속기와 모터의 회전량에 달려 있습니다. 모터는 빠르게 회전해 로봇의 움직임을 직접
담당하는 핵심 요소입니다. 하지만 단독으로 사용할 경우 강한 힘을 내기 어렵거나 세밀한 제어가 불가능합니다. 그 모터의 회전을 힘으로 바꿔주는 게 바로 감속기입니다.
감속기는 모터의 고속 회전 속도를 낮추고, 회전력(토크)을 증가시키는 역할을 합니다. 원리는 이렇습니다. 감속기가 모터의 회전을 줄이면, 감속된 회전에너지가 회전력으로 전환됩니다.
감속 비율을 높여 회전에너지를 더 많이 줄이면 줄일수록 에너지는 사라지지 않고 더 강한 회전력으로 변하게 돼, 작은 크기의 모터로도 충분한 힘을 낼 수 있습니다.
무릎・팔꿈치・손목과 같은 강한 힘이 필요한 로봇의 관절에 감속기가 필수적으로 활용되는 이유입니다.
또 감속기는 로봇이 유연하면서도 안정적인 동작을 구현할 수 있도록 돕는 역할도 합니다. 감속기가 없는 로봇은 관절이 흔들리거나 갑작스러운 동작에서 불안정해질 가능성이 높습니다.
그런데 감속기가 적용되면 회전 속도가 줄어들어 로봇의 무게중심이 조절되고 불필요한 진동이 억제돼, 관절의 움직임이 좀 더 안정적이고 부드러워집니다.
이러한 안정적인 성능은 로봇이 힘을 발휘해야 하는 작업, 예를 들어 무거운 물체를 들어 올리거나 매우 정밀한 위치로 이동해야 하는 작업에서 꼭 필요합니다. 감속기의 정밀도가
높을수록 로봇의 동작이 더욱 정확하고 일관되게 이뤄지며, 이는 결국 작업의 품질과 생산성에 직결됩니다. 감속기는 로봇 원가 비중에서 30% 이상 차지할 정도로 중요도가 높습니다.
휴머노이드 로봇에 사용되는 감속기는 하모닉, 유성 기어, 사이클로이드 등 여러 종류가 있습니다. 이 가운데 대표적인 감속기는 사이클로이드입니다. 사이클로이드는 내구성이 뛰어나고,
외부 충격에도 강하며, 높은 부하를 잘 견뎌, 로봇이 더욱 강한 힘을 내게 하는 데 적합합니다.
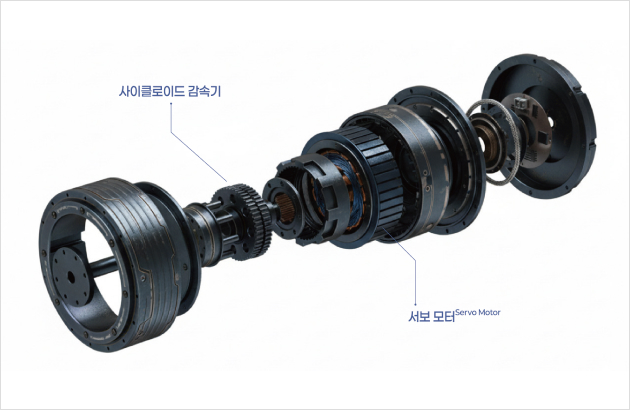
로봇의 관절을 움직이는 핵심 부품인 액추에이터. 모터가 회전에너지를 만들고,
사이클로이드 감속기가
회전 속도를 줄이는 대신 힘(토크)을 높여
로봇의 움직임을 정밀하고 부드럽게 제어한다.

사람의 팔을 섬세하게 쥐고 놓을 수 있는 로봇의 손. 제조업, 의료 등 다양한 분야에서 활용할 수 있다.









 이번 호 PDF 다운로드
이번 호 PDF 다운로드